
It was supposed to be quite fast, but I never really had much fun with it. The nitro motor was a bit touchy, didn't idle great, and was generally just not great for messing around in the lake. So, sadly, it sat on a shelf most of the time, gathering dust. A few years ago a friend gave me an old RC car with a brushed motor and an old mechanical speed control. I tried sticking that motor and speed controller in the boat, but it just putted around. I've got a couple of small RC planes that run brushless motors, and the power they put out has always impressed me. That, combined with the old brushed motor, put the seed of an idea in my head. This year I got the chance to spend a good long time up at the lake, so I figured now was the time to upgrade the boat to brushless power!
First I had to figure out what motor, electronic speed control (ESC) and battery to use. I found an online calculator that indicated that my old .31 cubic inch nitro motor put about 8-900 watts. I figured out that for a reasonable price I could get an 1800 watt brushless inrunner motor that fit in the same space, which sounded good to me (why half-ass something when you can double-ass it?). I ended up choosing a turnigy aquastar 3660 1700kv water cooled inrunner (link), and it seems to be a great powerplant matched up to the stock driveline (mostly). I believe it could swing a significantly larger propeller, but I'll explore that later. Working backwards from the motor, I chose a 120 amp water cooled ESC (link), and a 4s 40c 5000mah LIPO battery (link) I used XT90 connectors for everything. I've not used them before, and I like them a lot, though they are a bit hard to disconnect.
I had to drill out the stock hardened steel drive coupling to fit the 5mm motor shaft, which was a bit of a chore, and then I had a few teething problems (mostly with junky old radio gear and water damage). In response, I added the body mounts from an old RC car at the back (black posts) to hold the cover on better, and I also put a 2.4ghz radio in it (sealed inside a balloon for water protection), and a waterproof steering servo. The stock nitro motor is water-cooled, which made hooking up the water-cooling for the motor and ESC a breeze with just a few feet of new tubing. This is what it looked like at that point:

The battery sits in the big empty strap in the middle, though I may end up moving it to the front of the compartment to help keep the nose down at speed.
It ran pretty well like that:
The only problem was that at high steering angle, the driveshaft binds a bit and whenever that happened, the driveshaft coupling would throw it's center link (dogbone), and I'd be dead in the water. Here's a closeup that shows the old drive coupling:

This happened a ton when the shafts were poorly aligned, but regardless of how well I got the 2 shafts aligned I couldn't completely stop it from happening. The big issue (I think) was that my motor mounts were too flexible, allowing the motor to twist when the driveshaft bound. The driveshaft tube was also not well supported, so it could probably move as well.
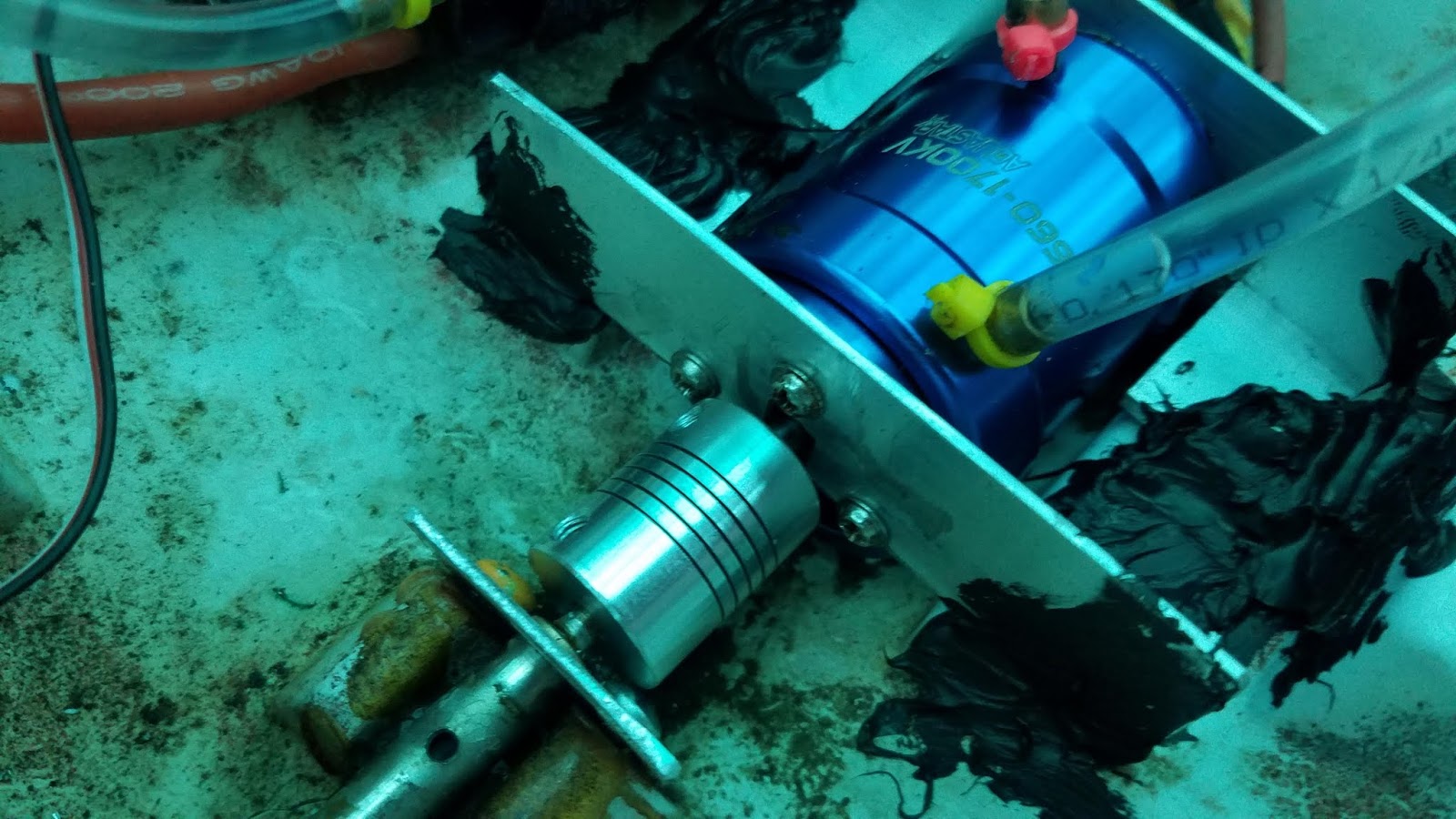
In response, I bought a spiral-cut aluminum shaft coupling on amazon (nicely sized with a 5mm hole for the motor and a 4mm hole for the driveshaft), I added an aluminum reinforcement for the drive shaft tube mount, I rebuilt the front motor mount out of a single piece of aluminum angle, and I added a rear motor mount. Because the motor doesn't have rear mounting holes, I had to sandwich it between 2 pieces of aluminum angle. These upgrades seem to have helped a lot, the motor is VERY solidly located compared to the old setup, where you could wobble it around pretty easily by hand (let alone when you threw 1800 watts and 20,000 rpm at it...). Here are a few pics of the updated setup:


I am currently waiting for the extra sealant to dry so I can try it again. I try to goop everything in place with RTV both to prevent water from getting inside the bilge area as much as possible, and to prevent vibration from backing screws out of the plastic they're threaded into.
Anyway, the boat is currently a ton of fun to drive. It needs some trim or ballast to handle full throttle, but at up to 75% throttle it's very fast and controllable. If I can get it trimmed out better on a dead-calm day I might be able to sustain full throttle for more than a half-second :) If that happens, I can always pony up for a bigger prop, as the ESC and motor currently run barely warm to the touch. And if THAT ever gets boring, I could go up to a 6s battery...
UPDATE: It works great! In addition to not throwing the coupling link under hard cornering and generally working well, the boat is significantly quieter. I attribute this to reduced driveline vibration, which is good all around. Now my top speed is limited by a combination of water calmness, my own driving ability (and vision, should put my glasses on before I drive this thing...), and what appears to be some high speed cavitation or air entrainment. Either way, it's a great, fun setup at this point, so I think I'll enjoy it for a while before I start messing around with props (though I have found and edited a few intriguing SCAD files for parametric prop design...)
No comments:
Post a Comment